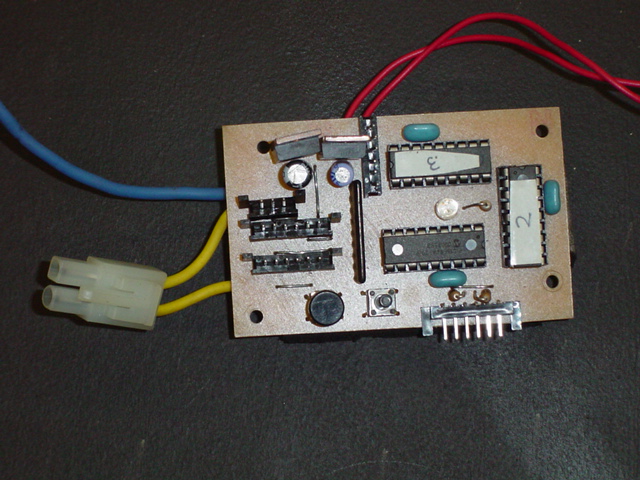
崱擭偐傜俹俬俠侾俇俥俉俈俁傪巊梡偡傞偙偲偵偟丄僾儘僌儔儉偺僥僗僩梡偱嶌偭偨婎斦偱偡丅
億乕僩偑憹偊偨偺偱丄僷乕僣偑憹偊傞偙偲傪梊憐偟儐僯僶乕僒儖婎斦傪崟偔揾偭偰嶌傝傑偟偨丅俹俬俠傪僜働僢僩偐傜敳偔偲偒偵懌偑愜傟傞偺偑寵偩偭偨偺偱丄 僨傿僢僾僜働僢僩傪巊梡偟傑偟偨偑丄愙怗晄椙偑懡偐偭偨偱偡丅僒僀僘偼偪傚偭偲戝偒傔偱偡丅
偙偺婎斦偼丄忋庤偔摦嶌偟偰偔傟傑偟偨丅
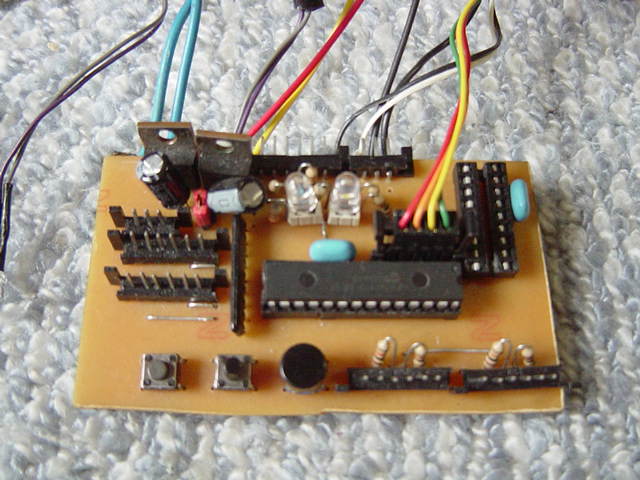
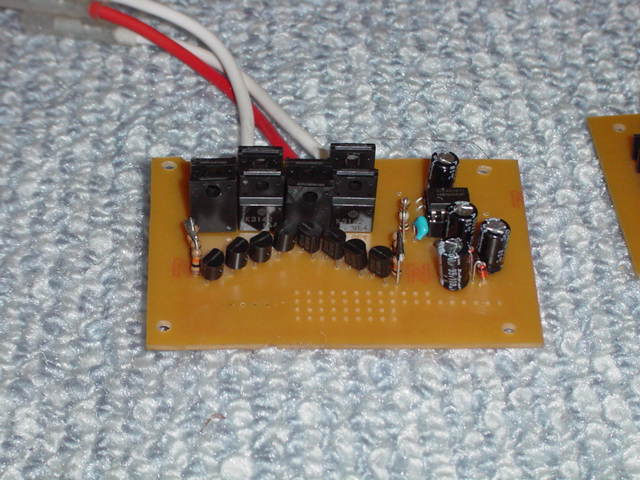
偙偺婎斦偵偼丄揋僙儞僒乕俈偮丒敀慄僙儞僒乕4偮丒儘乕僞儕乕僄儞僐乕僟乕侾偮丒帩偪忋偑傝僙儞僒乕侾偮晅偗傞偙偲偑偱偒傑偡丅
幚嵺偵偼丄揋僙儞僒乕俆偮丒彴僙儞僒乕係偮偟偐晅偗傑偣傫偱偟偨丅
儌乕僞乕偲婎斦偺揹尮傪堦弿偵偟偨傝丄暿乆偵偟偨傝曄峏偱偒丄PIC傪傕偆堦偮嵹偣傞偲丄儔僕僐儞傾儞僾倧倰僒乕儃傪2屄傑偱惂屼壜擻丅
婎斦偺僒僀僘偼丄栺俁侽亊係俆偱彫宆偵弌棃偨偲巚偄傑偡丅
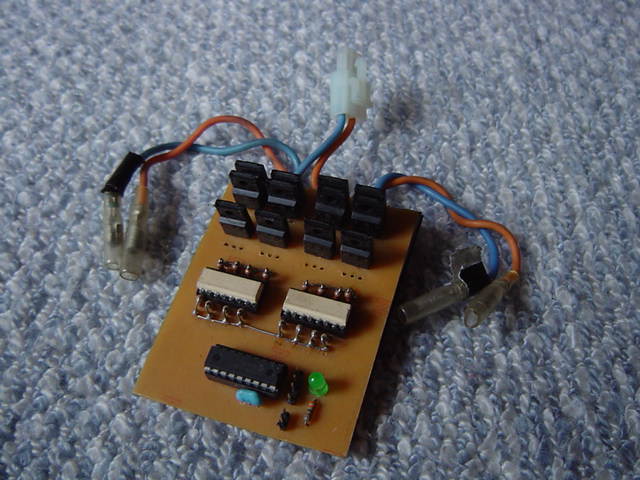
俥俤俿偺俫僽儕僢僕偱儌乕僞乕傪惂屼偟偰偄傑偡丅
惓揮丒媡揮丒僽儗乕僉丒僼儕乕偑偱偒傑偡丅
俥俤俿偼丄俶僠儍僱儖偲俹僠儍僱儖偺崿崌偱丄俁侽倁俆侽俙傑偱巊偊傑偡丅
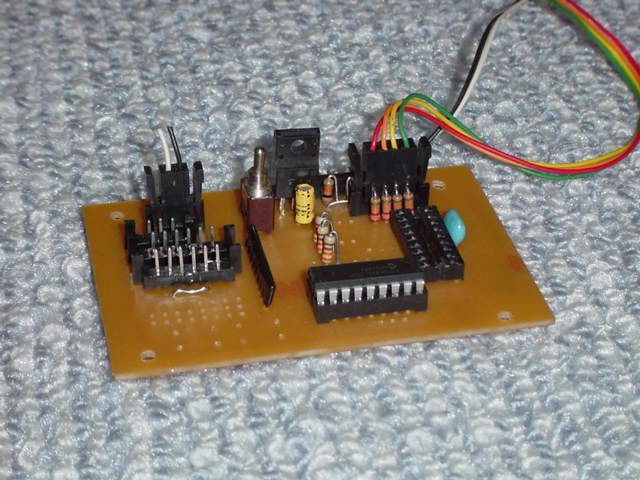
崱夞偼丄僼僅僩僇僾儔傪巊偭偰丄俥俤俿偺僎乕僩傪俷俶乛俷俥俥偟偰偄傑偡丅