5月中旬には完成していて、部内戦とか何度かやったりしたけど部内最弱の機体だった。
それからダラダラと改良をしたりしていました。
大会での成績は
優勝でした。
2005年製作ロボット
|
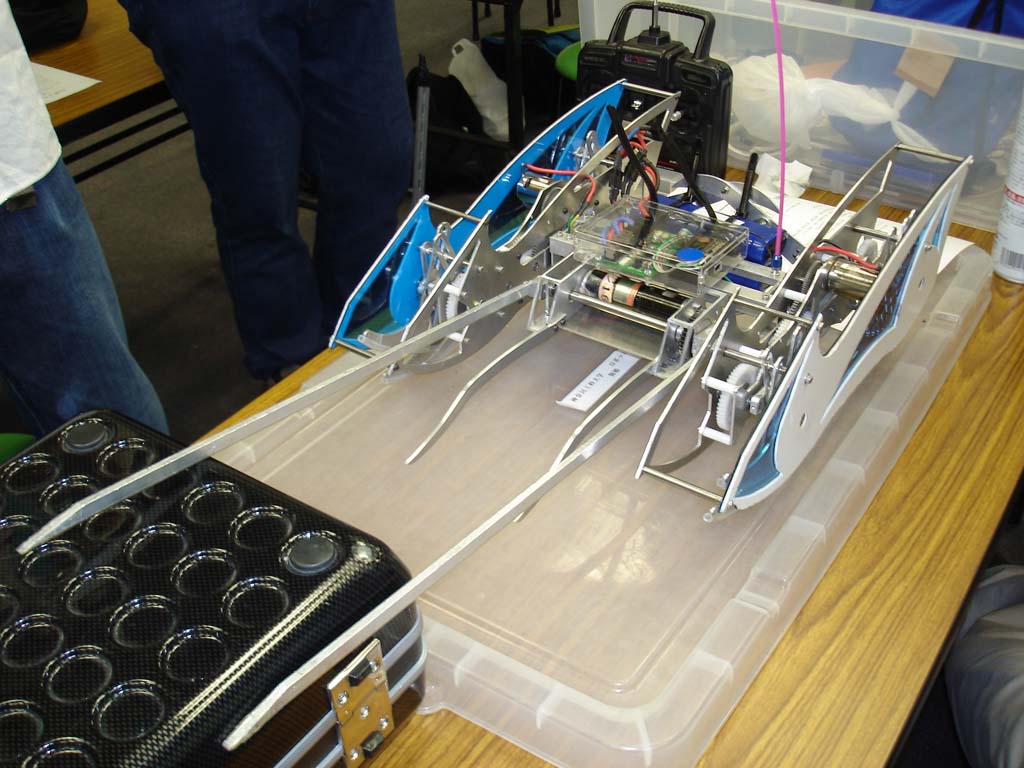
去年製作した「姫」の改良型として設計しました。 5月中旬には完成していて、部内戦とか何度かやったりしたけど部内最弱の機体だった。 それからダラダラと改良をしたりしていました。 大会での成績は 優勝でした。 |
| 足の数 | 12本 |
| ドライバー | JKSoft 3ch ANP |
| アームモーター | マクソンモーター20W1本 |
| アームの長さ | 約500mm |
| バッテリー | 単2形ニッカド 1300mAh 14セル |
| SEO | [PR] 爆速!無料ブログ 無料ホームページ開設 無料ライブ放送 | ||
